

In 2017, German pilot Niels Herbrich flew his homemade remote-control plane at 465mph (Mach 0.62). Six years later, his speed record remains unbroken. The Mach Initiative aims to break this record with an aircraft that will reach speeds exceeding 600 mph (Mach 0.8) at sea level. Employing a small, closely integrated team of students at the University of Bath has facilitated the rapid iteration of designs. The team has moved from concept to manufacture of its Kingfisher aircraft in under 8-months. In compliance with the requirements of the record, the aircraft must take off, and fly through a 35m high, 400m long timing track in alternate directions before landing, refueling, and repeating. Thrust must be generated using air-breathing engines.
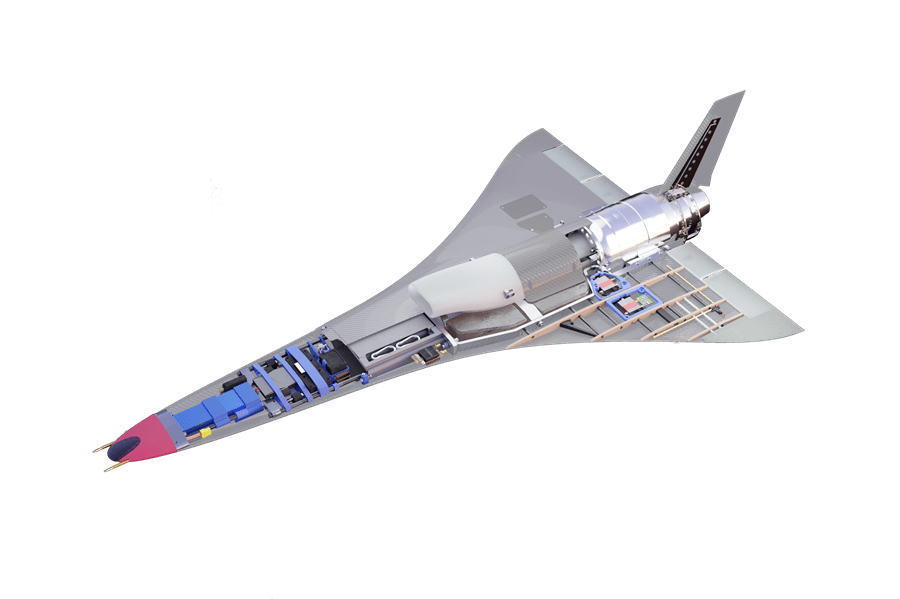
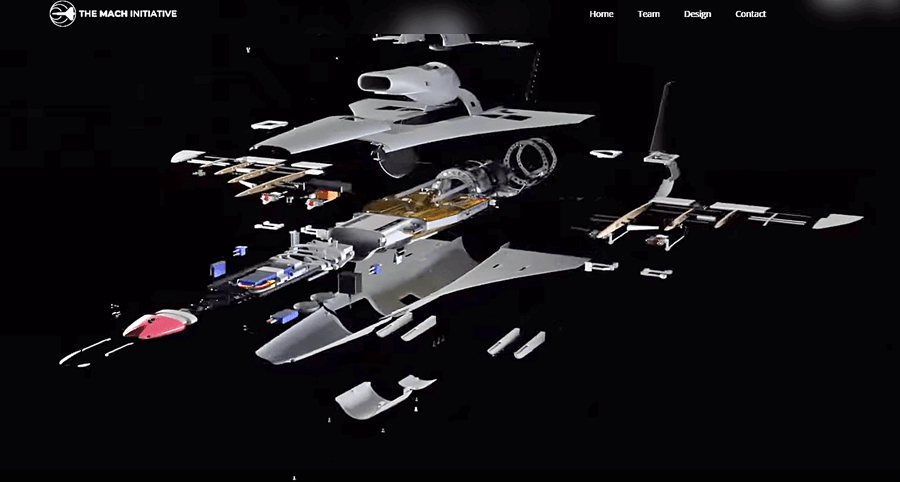
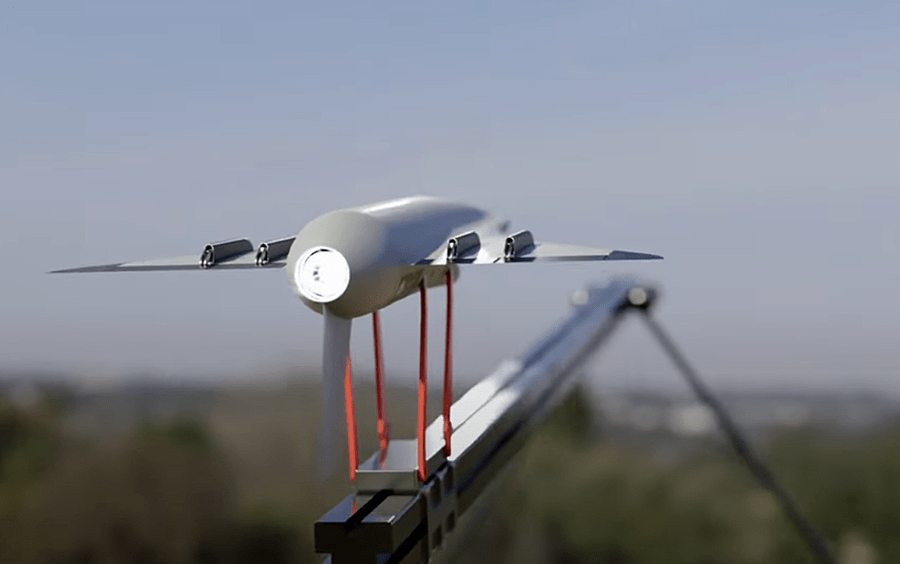
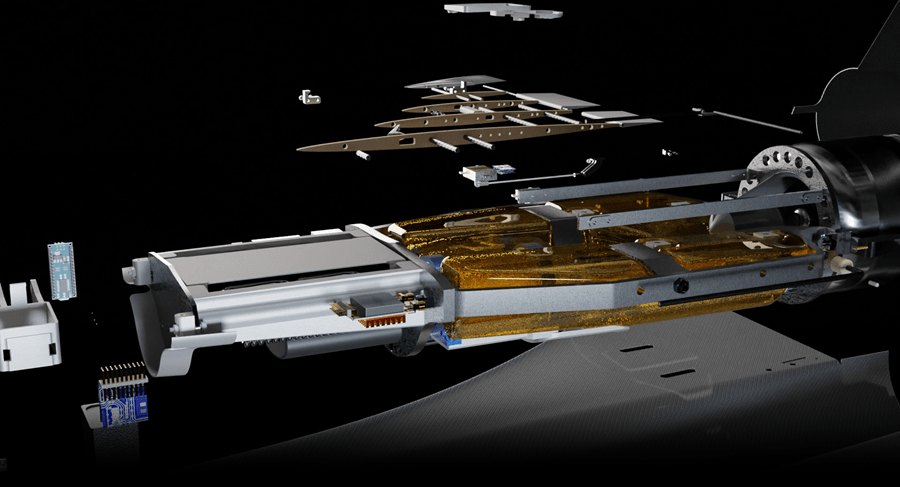
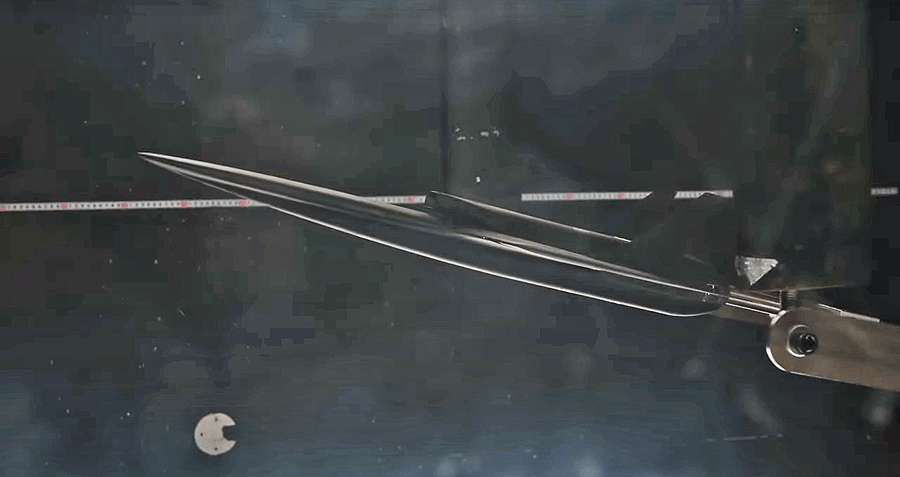
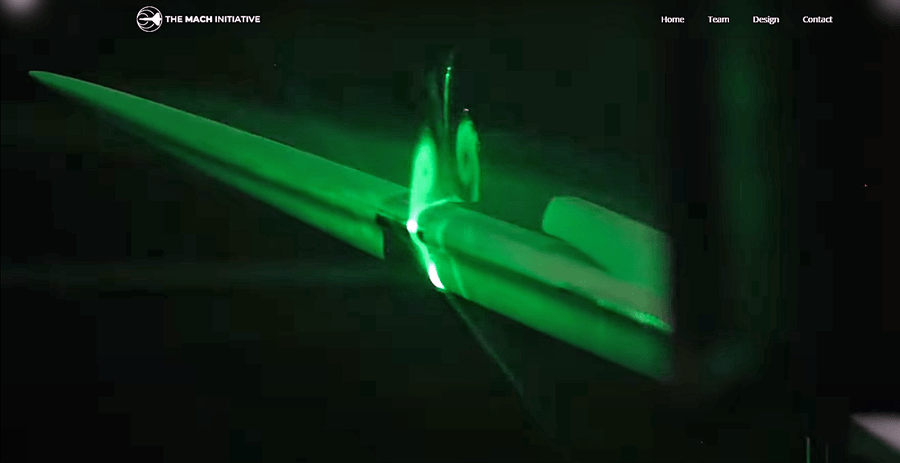
Kingfisher is a 1.3-meter long blended delta wing powered by a Jetcat P300 Pro micro-turbojet engine. The Kingfisher will launch from a pneumatic catapult system, performing a series of accelerated turns to reach 610 mph (Mach 0.8 at sea level) in the timing track. To keep the inlet on the bottom for propulsive performance, the Kingfisher performs most of its flight upside down, before rolling over for a belly landing to avoid the need for landing gear. The Kingfisher also carries a parachute flight termination system, in conjunction with redundant avionics and flight-control systems, using a safety hierarchy to ensure it never leaves the test range. The team worked closely with Callen Lenz during the design, learning from their wealth of expertise in developing commercial UAVs, which included working with their pilots to ensure the aircraft is flyable. The fiberglass semi-monocoque structure, chosen for its radio transparency, was optimized using Finite Element Analysis, with internal ribs, bulkheads and spars also providing mounting points for off-the-shelf components and access hatches for maintainability. Meanwhile, four elevons control the aircraft in pitch and roll, with these sized to trim the aircraft even if one fails. These are controlled using a Pixhawk Cube autopilot which also supports autonomous GPS waypoint missions, along with an FPV camera and laser altimeter to maintain a 35m ground height in the timing track. Story and photos courtesy of The Mach Initiative.




{kind=link}