")
16.7K
In this comprehensive tutorial, I’ll walk you through the process of building an FPV drone from scratch, providing detailed guidance for both analogue and digital FPV systems. We’ll cover everything from selecting the right components, to wiring and assembly, and even share insider tips and tricks to ensure you have a reliable and enjoyable FPV drone experience.


Some of the links on this page are affiliate links. I receive a commission (at no extra cost to you) if you make a purchase after clicking on one of these affiliate links. This helps support the free content for the community on this website. Please read our Affiliate Link Policy for more information.
Can Beginners Build FPV Drones?
Absolutely! Even if you have no prior experience, beginners can totally build FPV drones.
Sure, it might be tempting to simply buy a ready-made drone off the shelf—but where’s the fun (and learning) in that? By assembling your own drone from scratch, you’ll gain valuable hands-on knowledge about each component and how they all work together. You’ll also be much better prepared to troubleshoot and repair your drone if anything goes wrong.
Now, I won’t sugar-coat it—building your first FPV drone will be challenging. It may take hours, or even days, to complete. Along the way, you’ll need to seek advice from experienced pilots online or figure things out through trial and error. But trust me—the sense of accomplishment and the skills you gain will make the journey incredibly rewarding.
So, let’s dive in and embrace the challenges ahead!
Mastering the Basics
Before we embark on this exciting tutorial, it’s crucial to familiarize yourself with the basics of a quadcopter.
To get started, check out our beginner-friendly guide: Getting Started with FPV Drone.
As you explore the world of FPV, you’ll likely encounter many acronyms and technical terms. Don’t let these intimidate you! When in doubt, refer to our handy glossary: Decoding Acronyms and Technical Terms in FPV.
Parts List
In this tutorial, we’ll be using the following parts to guide you through the FPV drone building process.
Just a quick note: the links provided are affiliate links. Making a purchase through these links won’t cost you anything extra, but it will earn me a small commission. This support helps keep the blog running and allows me to continue sharing my passion for FPV drones with you—thank you!
This particular build focuses on the DJI O4 Pro Air Unit. If you’re interested in building an analog FPV drone, check out my other build log here: https://oscarliang.com/how-to-build-fpv-drone-analog/
If you have a small budget, here is a list of the cheapest 5″ drone parts.
If you want more options, here is a list of parts that I recommend.

Frame

The frame is the sturdy structure that holds all of the drone’s components together.
For this tutorial, I’ve selected the GEPRC Vapor—an excellent choice thanks to its high build quality. It also comes with a variety of 3D-printed accessories, making for an incredibly easy and clean build.
Check out my detailed review of this frame, along with step-by-step assembly instructions, here: https://oscarliang.com/geprc-vapor-x5-d5-frame/.
FC and ESC

Buying the flight controller (FC) and ESC together as a stack is not only more affordable, but it also ensures that they are plug-and-play right out of the box, making the drone building process much smoother and more straightforward.
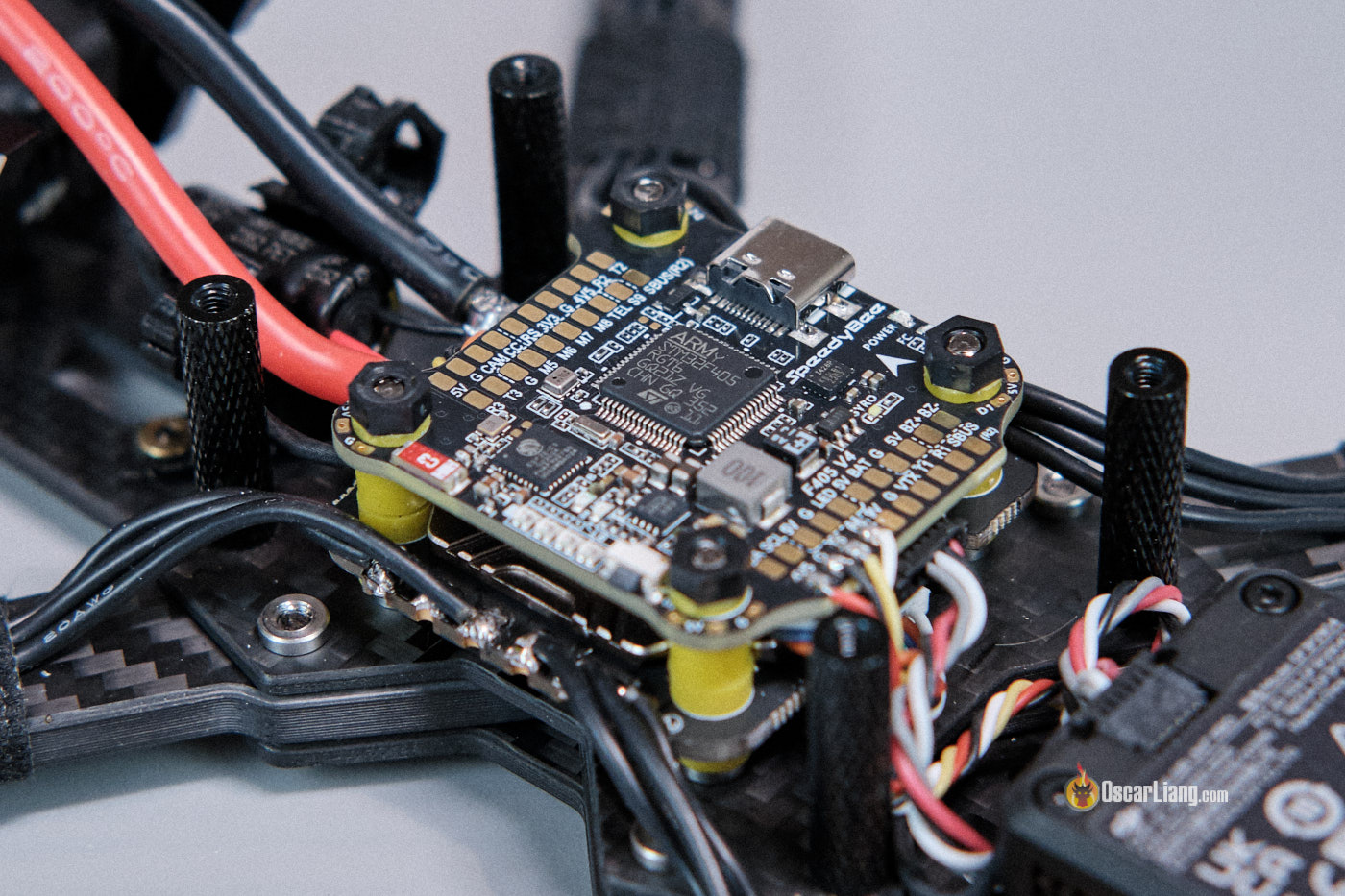
For this tutorial, I’ve chosen the Speedybee F405 V4 stack. Despite being one of the most affordable FC/ESC stacks on the market, it doesn’t compromise on features. It supports almost all modern functionalities you’d want in an FPV drone. Check out my in-depth review of the Speedybee F405 V4 here: https://oscarliang.com/speedybee-f405-v4/.
If the Speedybee F405 V4 is out of stock, don’t worry—there are plenty of excellent alternatives. Here’s a list of my top recommendations: https://oscarliang.com/flight-controller/#The-Best-FC-Recommendations.
Motors

FPV motors today are surprisingly similar in terms of performance, especially at the beginner level. That means there’s no need to buy the most expensive motors when you’re just starting out—most people wouldn’t even notice the difference. Budget options like the EMAX ECO II series are more than adequate for beginners.
For a 5-inch FPV drone, motor sizes such as 2306, 2207, and 2208 are all viable choices. Personally, I believe 2207 hits the sweet spot in terms of performance-to-weight ratio. Learn more about the differences here: https://oscarliang.com/2306-2207-mini-quad-motor/
Another important factor to consider is motor KV, which is linked to your battery voltage. For a 6S build, I recommend choosing motors with a KV rating between 1600 and 2000. Higher KV motors deliver more aggressive and power-hungry performance. In this build, I’ve chosen 1900KV motors, as the next lower option (1700KV) feels a bit too low for my taste.
There are many other excellent motors worth considering—check out my full list of recommendations here: https://oscarliang.com/motors/#Recommendations
FPV Setup

There are several FPV systems available on the market, but the DJI O4 Pro would be my top choice for a 5-inch freestyle drone. It offers the best image quality and signal reliability, and top-notch build quality. If you want to learn more about the different FPV systems and their pros and cons, check out my buyer’s guide: https://oscarliang.com/fpv-system/
Radio Receiver

Your choice of radio transmitter dictates the type of receiver (RX) you can use. If you followed my radio recommendations, your radio should support ExpressLRS (ELRS), which is currently my top choice for a radio link. ExpressLRS is affordable, high-performance, and incredibly reliable: https://oscarliang.com/expresslrs/
Numerous manufacturers produce receivers and transmitter modules for ExpressLRS. You can choose any of these, and as long as they’re ExpressLRS, they’ll work together. For this tutorial, I’ve selected the BetaFPV ELRS 2.4GHz Nano, which is one of the cheaper options on the market and works well.
To help you set up ExpressLRS, I’ve put together a step-by-step tutorial: https://oscarliang.com/setup-expresslrs-2-4ghz/
To fly a quadcopter in FPV, you’ll need the following accessories. Take a look at my everyday gear for inspiration. Here is a summary:
Tools and Supplies
To build the drone, you’ll also need the following tools and supplies. You may already have some of these items, if not, they should be easily found online or at your local hardware store.
Essential:
Optional but recommended:
For those truly passionate about the hobby, here’s a comprehensive list of tools that you may find invaluable on your FPV drone-building journey.
Steps of Building FPV Drone
Click the link will take you to the section in this article:
1. Frame Assembly
Follow my detailed step-by-step tutorial to assemble the GEPRC Vapor frame: https://oscarliang.com/geprc-vapor-x5-d5-frame/
You need to complete the frame assembly to this stage before moving on to the next steps.

2. Installing Motors
Now, it’s time to mount the four motors onto the arms.
The EMAX ECO II motors come with screws of different lengths. Use the screws with a 7mm thread length, which are suitable for 5mm thick arms.

It’s highly recommended to use threadlocker (such as Loctite) on the motor screws, as vibrations can cause them to loosen over time.
Some motors come with threadlocker pre-applied (appearing as a blue coating on the threads), but the ECO II motors do not, so you’ll need to apply it yourself.

Some builders use only three screws or even two to save weight, but I recommend using all four screws for maximum durability.

Important: Before fully tightening the motor screws, make sure they are not too long and aren’t pressing against the motor windings. If you’re unsure, follow this guide: https://oscarliang.com/check-motor-screws-touching-winding/


3. Wiring Diagrams
If you’re using the components I recommended, refer to this wiring diagram for guidance.

Before cutting and soldering any wires, you can “dry fit” all the components in the frame. This process allows you to gauge how long the wires should be, determine the best location for your components, and identify any potential spacing issues.

4. Installing ESC
Start by installing the four long bolts that come with the Vapor frame into these holes.


Slide the 4in1 ESC and FC boards onto the bolts.
Normally, the ESC’s power pads (+ and -) should face the rear. However, because the Vapor frame routes the battery lead through the middle, it’s best to rotate the ESC 180 degrees. This means you’ll have to remap the motor order later in Betaflight (don’t worry, I’ll explain how).

Check carefully, nothing should touch between the bottom of the ESC and the frame, and between the ESC and FC boards.

Next, we will solder the motors to the ESC. If you’re new to soldering, refer to the tutorial “How to Solder for Beginners“.
There are three common ways to route and solder motor wires:
- Simple and casual routing: Just solder the wires directly to the ESC pads. It’s fast and easy, but the build won’t look as clean. If you are not good with soldering, do this.
- Neat routing around stack screws: Wires loop neatly around the screws. Looks cleaner but slightly heavier due to longer wires (a few extra grams).
- Tight, stacking routing (my favorite): Wires are cut as short as possible. Very clean aesthetic, but more challenging to solder as the wires are stacked on top another.

Secure the motor wires on the arms with cloth tape or electrical tape. The Vapor frame kit includes plastic tubes for wire protection, they do look neat and professional, but I found them impracticable and heavy.
Measure and cut motor wires, it’s always better to leave a little slack.

Strip about 2mm off the tip of the wires and tin the ends.

Tin all the motor pads on the 4in1 ESC (fill the pads with a nice dome of solder first before soldering the wires).

Don’t worry about the order of the motor wires—you can easily reverse motor spin direction later in Betaflight.

Now, solder the capacitor that comes with the Speedybee stack. Insert the provided heatshrink tubes, shorten and bend the legs.
Solder the capacitor onto the battery pads (+ and -) on the ESC. Pay attention to polarity – the negative leg is marked by a light-colored stripe on the capacitor.
Why a Capacitor?
A capacitor reduces voltage spikes and electrical noise from the motors and ESC, protecting your electronics as well as reducing noise getting to the gyro, improving the flight performance of your drone. Learn more about why capacitors are important: https://oscarliang.com/capacitors-mini-quad/

The capacitor can now sit securely inside the included TPU mount.

Now, solder the XT60 power lead to the power pads on the ESC, pay attention to polarity (positive and negative). This is perhaps the most challenging step in this build, due to the amount of heat required to melt the solder on the large copper pads and thick wires. Be patient and use a higher temperature on your iron.

Soldering Tips:
- Use a good amount of solder and solder flux (solder paste) for the large pads, ensuring the solder joints are shiny and full. If you can see the wire strands, you haven’t applied enough solder.
- Apply more flux if the solder “sticks” to the tip when you remove it from the joint.
- Feel free to use a high temperature when soldering large solder pads, but be quick and avoid overheating the pads for too long. Use 450°C (840°F) for motor wires and XT60, and 380°C for signal wires.
5. Testing ESC and Motors
We will now test the ESC and motors by connecting the battery.
But before plugging in a LiPo battery for the first time, ensure there are no electrical shorts. Using a multimeter in continuity mode, test the positive and negative terminals of the XT60 (or directly on the ESC power pads). If there is a short circuit, the multimeter will beep continuously. In this case, do not plug in the battery, as it may damage your components. Instead, troubleshoot and fix the issue that is causing the short circuit.
For more information on using a multimeter to test your drone, check out this tutorial.
Pro-Tip: A short beep followed by silence may occur when testing continuity due to capacitors charging. This is normal and shouldn’t cause concern. As long as it stops beeping after a second or two you should be fine.

Now, connect the FC to the ESC using the provided 8-pin cable, and connect the FC to your computer via a USB cable.
It’s highly recommended to use a smoke stopper when plugging in a battery for the first time. While not mandatory, it’s a useful investment to avoid damaging components.

Do not put on propellers yet.
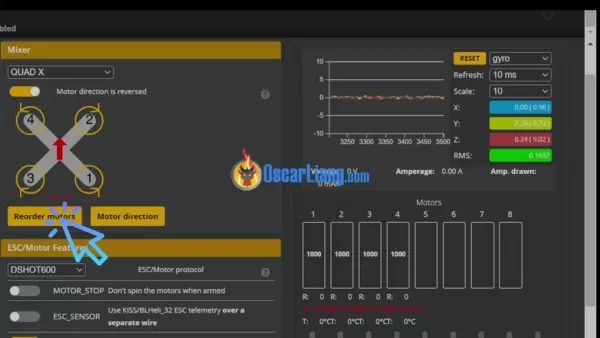
To test the motors, plug in the battery and connect the USB cable to the flight controller. Open Betaflight Configurator, and go to the Motors tab.
Choose DShot300 in ESC Protocol. Click Save and Reboot.

Now, enable motor control, and you should be able to spin up the motors – do this one by one, move the slider to around 1100 is enough.

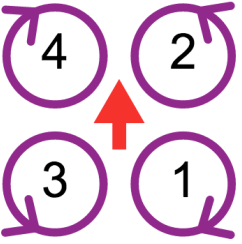
You wan to make sure the motor that is spinning matches the number in the diagram, e.g. motor #1 is the rear right, motor #2 is front right etc.
If the motor order is wrong (most likely wrong because we rotated the ESC 180 degrees in our build), you can easily fix it by clicking the “Reorder Motors” button in the motors tab, and just follow the simple instructions. You can also fix it using CLI commands but it’s quite complicated, so just use the tool 🙂
Once the motor order is correct, you need to verify if they are spinning in the correct direction. To reverse a motor direction, there are a few ways, the easiest is to use the Betaflight Configurator (Motors tab) as explained here.
Troubleshooting tips:
- If motors aren’t spinning, ensure the battery is connected and you’ve turned on the Short Saver if you are using it. And the ESC should beep as soon as you plug in the battery. Make sure the ESC is connected to the FC, and that the pin connections are correct.
- If all motors spin except for one, that particular ESC, motor, or the ESC signal from the FC might be faulty. To troubleshoot, swap the non-functioning motor with a working one on the same quad to determine if the issue lies with the ESC or motor.
For further assistance, ask in the forum: https://intofpv.com
6. Receiver Setup
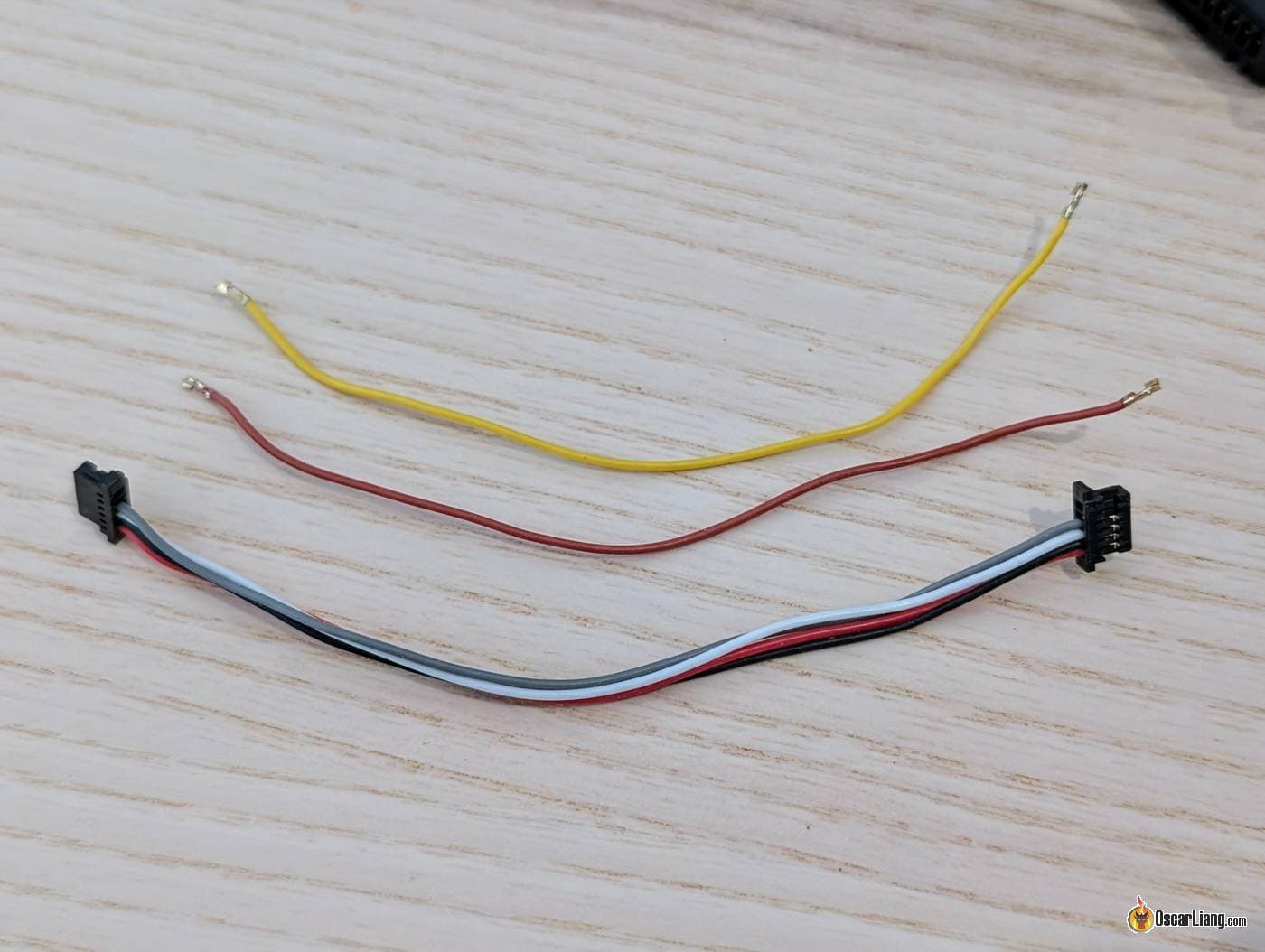
Start by soldering the provided wires to the receiver.
While the wire colors technically don’t matter, following a consistent color scheme makes troubleshooting much easier. I recommend using this color coding:
- Black wire → GND (G)
- Red wire → 5V (V)
- White wire → TX (T)
- Yellow wire → RX (R)

The frame includes a TPU holder where you can neatly put the receiver in.

Wire the flight controller to the receiver like this (from FC to receiver):
- 4V5 → V (5V)
- G → G (Ground)
- T6 → R (Receiver RX)
- R6 → T (Receiver TX)

Mount the receiver and antenna securely inside the frame like this.

Now, bind your radio to the receiver by following this tutorial: https://oscarliang.com/bind-expresslrs-receivers/.
Once that’s done, we can set up the receiver in Betaflight configurator:
- Go to the Ports tab and enable “Serial RX” for the UART connected to the receiver (UART6 in our example, because we connected it to T6 and R6). Click Save.
- In the Receiver tab, select “Serial (via UART)” in Receiver Mode and choose “CRSF” in Serial Receiver Provider. Enable Telemetry. Click Save.


After this, the receiver should be working. To confirm, go to the Receiver tab, and the bars (channel values) should change when you move the sticks on the radio. If the wrong channels are responding, try a different Channel Map such as “default (AETR)” or “TAER”.
You will need to setup switches on the radio for arming, flight modes and beeper. Follow this tutorial to learn how: https://oscarliang.com/setup-switch-mixes/

If you have any questions, post in the forum: https://intoFPV.com
7. Installing DJI O4 Pro
Connecting the DJI O4 Pro Air Unit to the Speedybee flight controller couldn’t be simpler—just plug in the provided cable and you’re good to go. The O4 Air Unit will be mounted on top of the receiver.

Push the two O4 Pro antennas securely into the holes in the rear TPU antenna mount.

If you’re controlling the drone using ExpressLRS, you may want to remove the SBUS and GND wires from the O4 connection cable. These wires are intended for the DJI remote controller, and leaving them connected can cause conflicts if you’re using the same UART for another device.
Mount the camera between the silicone dampers included with the frame.
If you’re new to flying, you might want to start with a lower camera tilt angle like 10° to 15°. As you become more comfortable and start flying faster, you can increase the tilt to 20° or even 30° for better forward visibility at speed.

Now we’ll configure OSD (On-Screen Display) to show important flight data like battery voltage, flight time, and warnings directly in your DJI goggles.

I have a full step-by-step guide here if you want more detail: https://oscarliang.com/how-to-setup-dji-o4-pro/
To summarize the process:
- In Betaflight Configurator, go to the Presets tab.
- Search for “OSD for DJI”.
- Select the preset you find.
- In the options, select “map to displayport”, “set HDOSD”, and the UART you’ve connected the O4 to (in our example that’s UART1).
- That’s it.


Now, head to the OSD tab, enable your favourite elements and move them around as you wish. Make sure you’ve selected HD under Video Format so you are using all the screen space available. I have my own OSD layouts if you want to copy: https://oscarliang.com/betaflight-osd/#My-OSD-Setup-CLI-Commands

8. Finishing Off
Secure the flight controller (FC) with nylon nuts.
Tighten only by hand to avoid over-compressing the rubber grommet as it could reduce vibration damping and defeat the purpose of soft mounting.

Next, install the top plate.

Here are the weights of the completed drone:
- Drone including propellers and battery strap: 453g
- Drone + 6S 1100mAh LiPo: 645g
- Drone + 6S 1100mAh LiPo + GoPro 13: 802g

When installing the propellers, pay attention to the different rotations—CW (clockwise) and CCW (counter-clockwise). Ensure they are installed on the correct motors; otherwise, your quad may not take off or could flip over when trying to.

Use M5 nylon lock nuts to hold the propellers securely on the motor. Tightening might be challenging at first but will become easier over time. Avoid overtightening to prevent prop hub shattering. Tighten just enough so the prop can’t move when you try to rotate it with your hand while holding the motor bell.
A dedicated prop nut tool can speed up prop changes.

When mounting the battery (and GoPro), ensure the COG (center of gravity) is as close to the drone’s center as possible. To check if the battery is placed correctly, grab the middle of the top plate with two fingers and see if the quad stays level. It’s essential to maintain the COG at the center of the four motors. For instance, if the quad is front-heavy, the front motors will work harder than the rear motors when trying to maintain its position, negatively impacting flight performance.

And we are ready for a test flight!






9. Setting Up Betaflight
We’ve already covered much of the Betaflight setup during this build. However, to double-check everything and ensure nothing is missed, follow my complete beginner’s tutorial here: https://oscarliang.com/betaflight-firmware-setup/
10. Tuning
Tuning your quadcopter involves adjusting it to fly and behave the way you want. Betaflight has come a long way; you don’t have to tune your quad, and it will likely fly just fine with stock settings. However, if you’re serious about performance, there’s more to learn!
For most people, tuning an FPV drone involves adjusting these settings:
Tuning is quite technical and sometimes involves the use of Blackbox logs. If you don’t know how to use Blackbox, this is how to tune your FPV drone in 10 simple steps. If you’re familiar with Blackbox, check out this in-depth guide on tuning filters and PID.
Before tuning, though, I’d recommend flashing Bluejay firmware to the ESC if they come with BLHeli_S firmware, it will give you better performance. When doing so, you’ll need to choose between the 24kHz or 48kHz versions. The 24kHz version provides better responsiveness and torque, while the 48kHz version offers smoother flight with slightly less torque. I recommend 48KHz. You can also enable bi-directional Dshot, and turn on RPM filter once you’ve flashed Bluejay. It’s one of the best filters available in Betaflight and makes your quad flies better.
I will share my PID and Filter tune for this build in my Patreon shortly, if you want to try my tune, consider subscribing: https://oscarliang.com/patreon-support-announcement/
11. Learning How to Fly
If you have little to no experience flying a mini quad, consider checking out these tutorials to get started:
If you have any questions, feel free to ask in the comments.
You can check my past build guides (some info is outdated):

{kind=link}